Opposable Thumb Hand Exoskeleton for Rehabilitation (OTHER Hand)
The Opposable Thumb Hand Exoskeleton for Rehabilitation (OTHER Hand) is a robotic hand exoskeleton for rehabilitation to be mounted on the EXO-UL8 and Blue Sabino upper limb exoskeletons as part of NSF Award #1532239.
The project is a collaboration between the UCLA Bionics Lab and Prof. Joel Perry's lab at the University of Idaho. Notable features include:
- Bimanual
- Opposable thumbs
- Designed with optimized link lengths to fit ~95% of the population
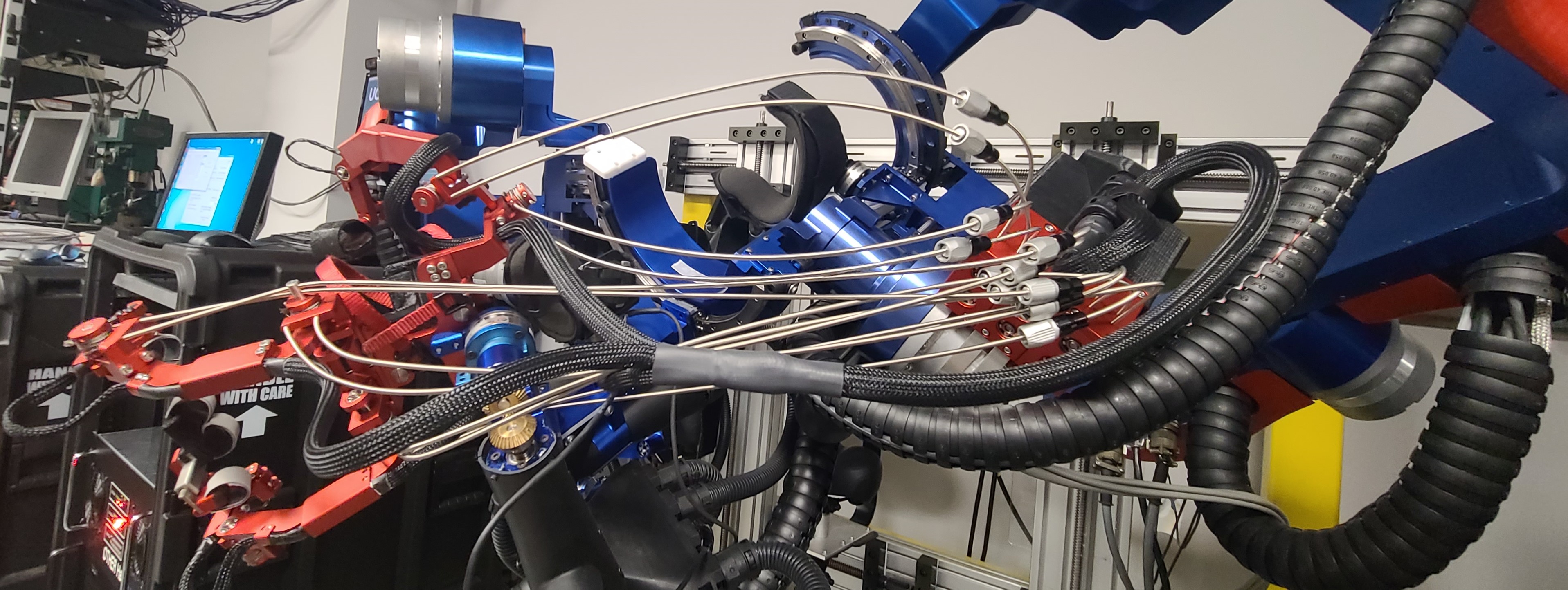
- 6 active and 7 passive degrees of freedom per side, including a novel pinky-slider mechanism
- Three reconfigurable linkages per side (one for the thumb, and two grouping the long fingers)
- Quick disconnect attachment mechanisms
- Remotely located motor pack driving a Bowden cable transmission system
- Integrated force and rotation sensors for feedback control